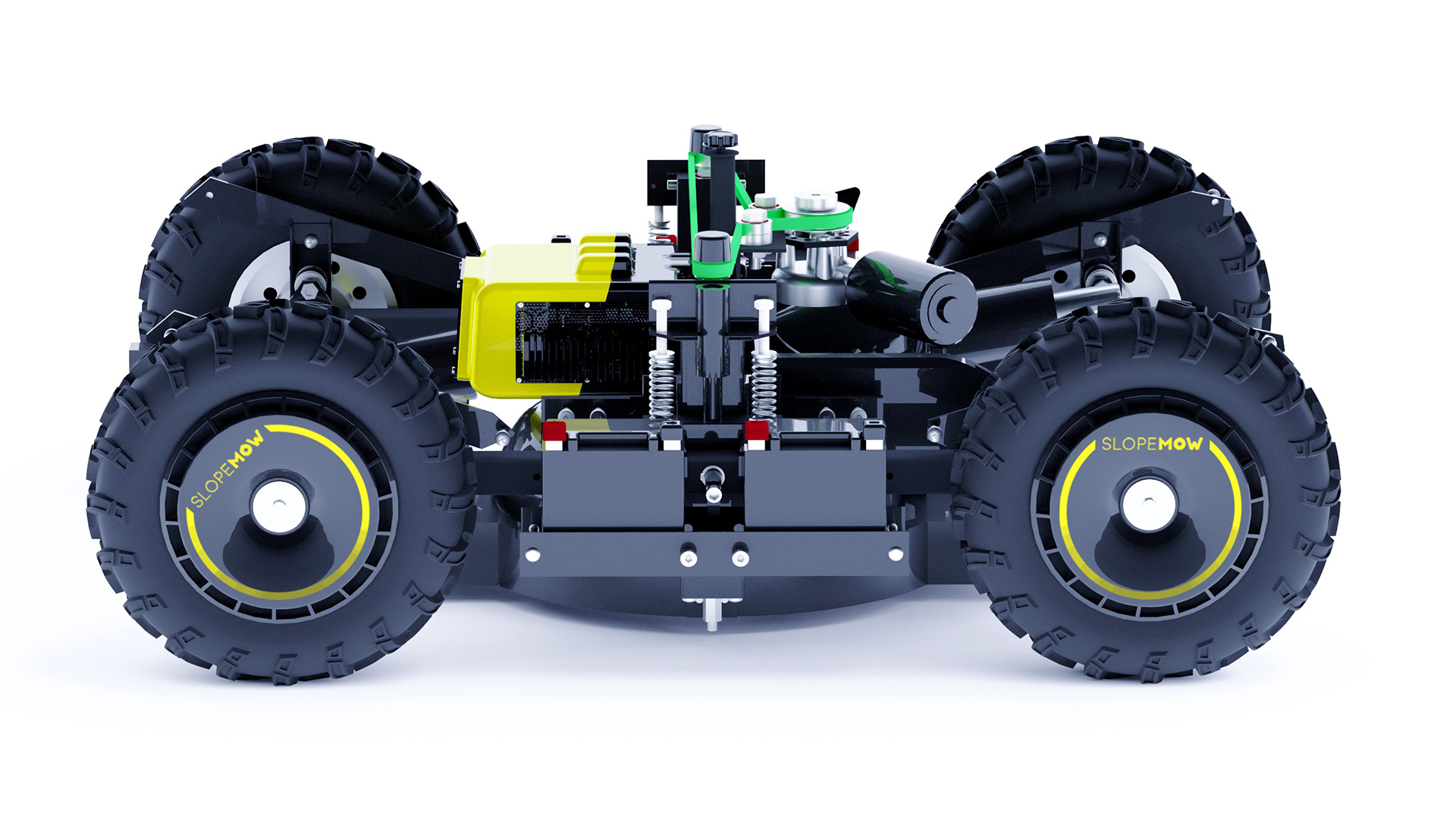
Da es in Österreich viele Hügel und Berge gibt, gibt es auch viele steile Hänge, die gemäht werden müssen. Da diese Hänge aber oft nur schwer zu bewirtschaften sind, hat das Team einen ferngesteuerten Steilhangmäher entwickelt, der nicht nur Steigungen bis 35° erklimmen kann, sondern auch ein modernes, stromlinienförmiges Design hat.
Als erster Schritt wurden unterschiedliche Konzepte designt und anschließend wurde ein 3D Modell in SolidWorks erstellt. Danach wurde der Prototyp gebaut und getestet.
Die Steuerung des Mähers erfolgt über eine selbst designte und selbst entwickelte Fernsteuerung. Um die Sicherheit beim Mähen zu gewährleisten, befinden sich am Mäher unterschiedlichste Sensoren, die beispielsweise die Steigung des Hangs messen.
Slopemow
Entwicklung eines ferngesteuerten Steilhangmähers
Florian Ritzmaier [5AHMBI] | betreut durch: Dipl.-Ing. Josef Eder
Juan Carlos Sandler [5AHMBI] | betreut durch: Prof. Or. Dipl.-Ing. Dr. Roland Mertz
Andreas Nagl [5AHMBI] | betreut durch: Dip. Des. Michael Bauchowitz
HTBLVA Sankt Pölten, , 2021

Preise
Jugend innovativ; Ketegorie Design 2. Platz
"Technik fürs Leben“ Wettbewerb der Firma Bosch erreichen des Finales der besten fünf Einreichungen
Kontakt zum Team
RR Dipl.-Ing. Otto Keiblinger, Abteilungsvorstand Maschinenbau
+43 2742 750 51-0
office@htlstp.ac.at
https://slopemow.cc/